#Norlab
UVT-RS
A blazingly fast trajectory description file format
During the last months, I worked on uvt-rs, my first project in Rust 🦀!
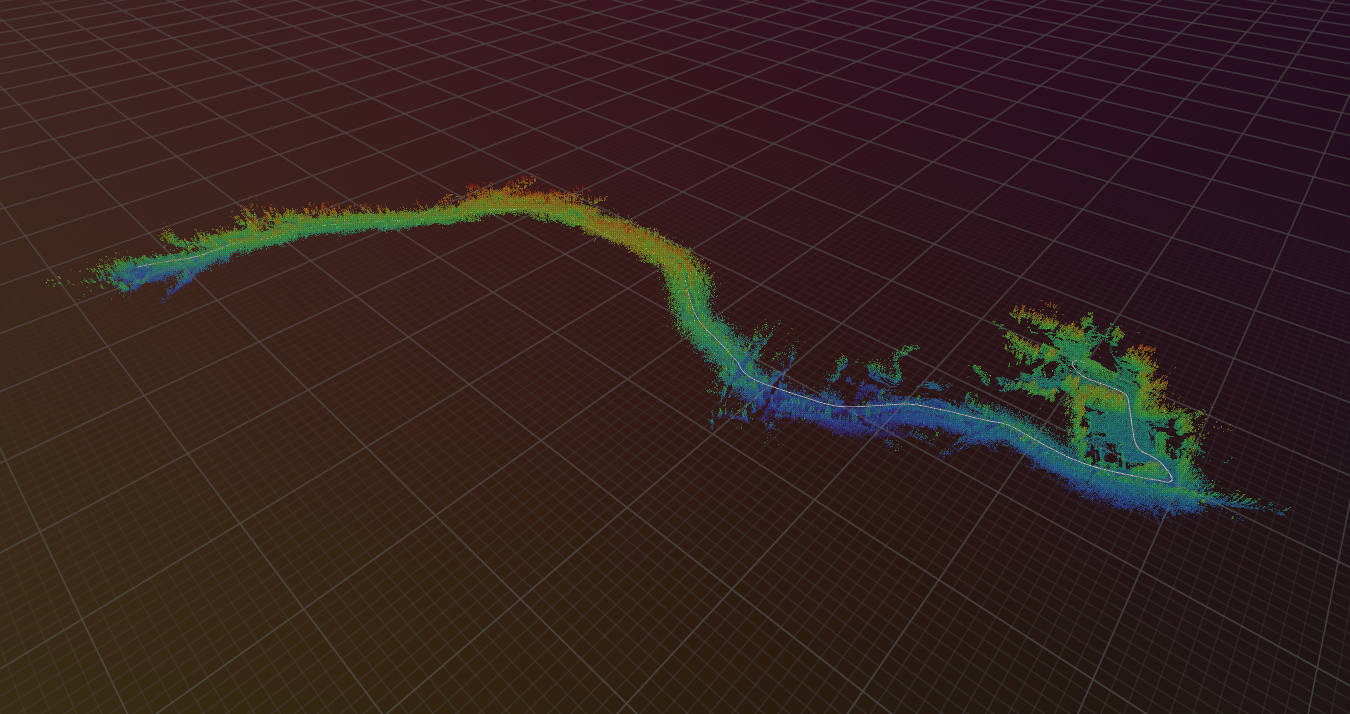
uvt-rs is a collection of Rust crates for processing and interacting with Uncrewed Vehicle Trajectory (UVT) files.
The UVT file format provides a lightweight way to describe trajectories of uncrewed vehicles, such as UAV, UGV, etc.
It was designed as an extension of the LTR format introduced in Kilometer-Scale Autonomous Navigation in Subarctic Forests: Challenges and Lessons Learned.
Using Citizen Science Data as Pre-Training for Semantic Segmentation of High-Resolution UAV Images for Natural Forests Post-Disturbance Assessment
Published in MDPI Forests journal!
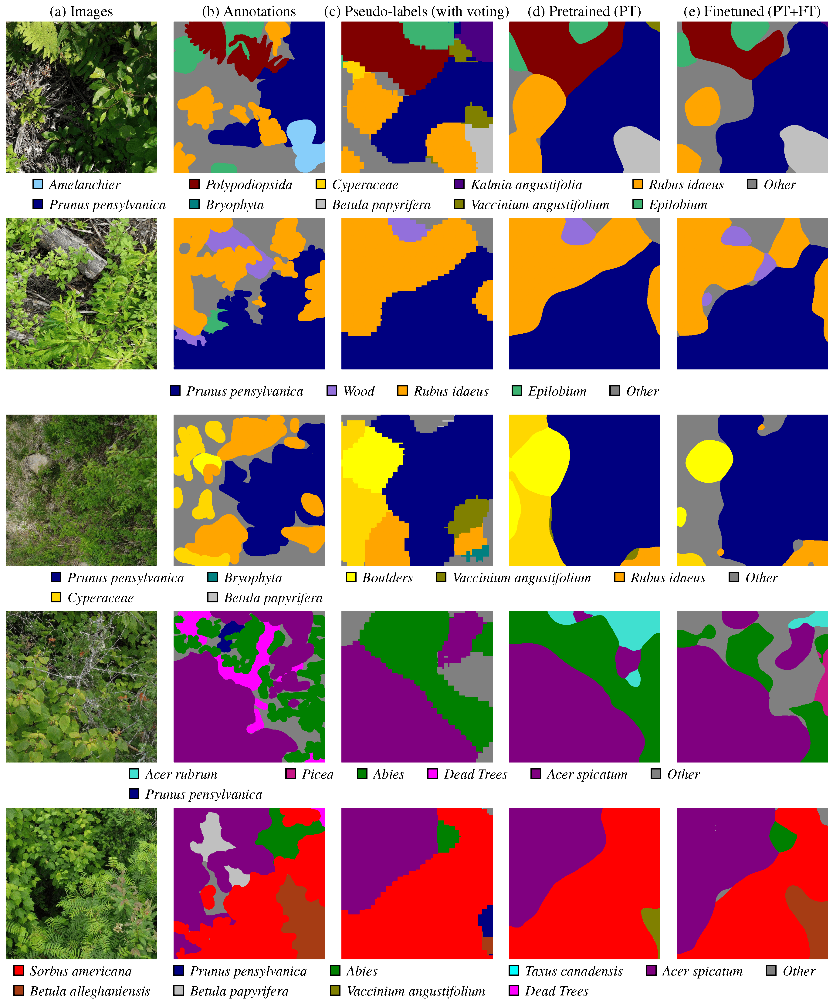
During the last months, I contributed to the paper Using Citizen Science Data as Pre-Training for Semantic Segmentation of High-Resolution UAV Images for Natural Forests Post-Disturbance Assessment, published in the Classification of Forest Tree Species Using Remote Sensing Technologies: Latest Advances and Improvements special issue of the Forests MDPI journal. This paper proposes a novel pre-training approach for semantic segmentation of UAV imagery, where a classifier trained on citizen science data generates over 140,000 auto-labeled images, improving model performance and achieving a higher F1 score (43.74%) than training solely on manually labeled data (41.58%). With this paper, we highlight the importance of AI for large-scale environmental monitoring of dense and vasts forested areas, such as in the province of Quebec.
Proprioception Is All You Need: Terrain Classification for Boreal Forests
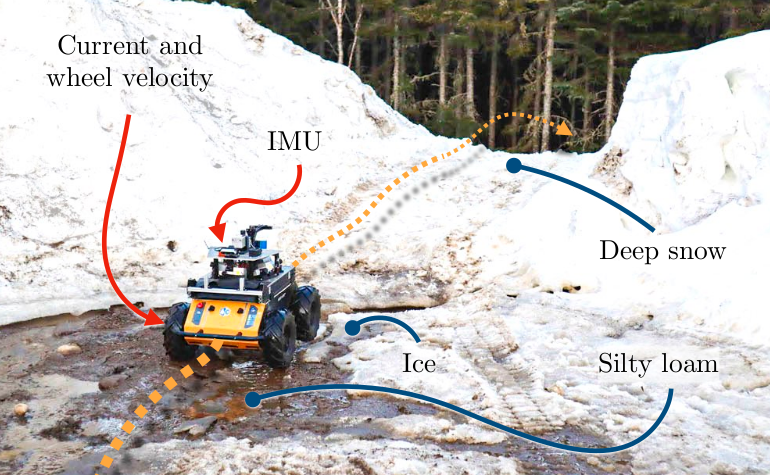
My paper, Proprioception Is All You Need: Terrain Classification for Boreal Forests, will be presented in the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), in Abu Dhabi, UAE. The paper presents BorealTC : a publicly available dataset containing annotated data from a wheeled UGV for various mobility-impeding terrain types typical of the boreal forest. The data was acquired in winter and spring on deep snow and silty loam, two uncommon terrains in an urban setting.