#Master
Proprioception Is All You Need: Terrain Classification for Boreal Forests
·
3min
·
Damien LaRocque
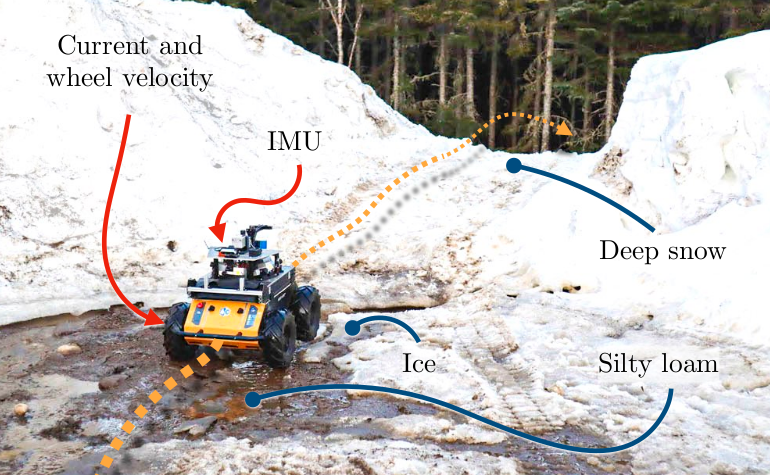
My paper, Proprioception Is All You Need: Terrain Classification for Boreal Forests, will be presented in the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2024), in Abu Dhabi, UAE. The paper presents BorealTC : a publicly available dataset containing annotated data from a wheeled UGV for various mobility-impeding terrain types typical of the boreal forest. The data was acquired in winter and spring on deep snow and silty loam, two uncommon terrains in an urban setting.